Project Description
Electric Scooter

This project idea started from wanting a faster, smoother, and longer range ride than my electric skateboard. Specifically, the goal of this project was to make a small electric vehicle that could reach 35mph, had pneumatic tires, and at least 20miles of range while also being similarly portable to my skateboard. For multiple reasons, a scooter seemed like the best platform for this project. A scooter is a much more stable platform than a skateboard so I could feel “locked in” going fast and if it had large pneumatic tires, it could tackle the unforgiving streets of Boston with ease. Also, a scooter frame gave more room for a bigger battery and other electronics which would enable the design goals. Lastly, a scooter could be folded up and be almost as portable a my skateboard.
I didn’t have the manufacturing resources to build my own frame and also wanted to have the safety of an industry proven design, so I looked around to buy an off the shelf frame that fit my requirements. Most of the electric scooters available either have small tires and not enough room to fit a large battery or are way too big to be easily portable. Eventually I came across the Razor e300, however, which had 10in pneumatic tires, a roomy electronics enclosure, and it was also relatively compact overall. I managed to find one on craigslist that had a flat tire and a dead battery for only $20!h This was cheaper than the material itself. I gutted the electronics and patched the leak in the tire tube — I had the frame I was looking for.

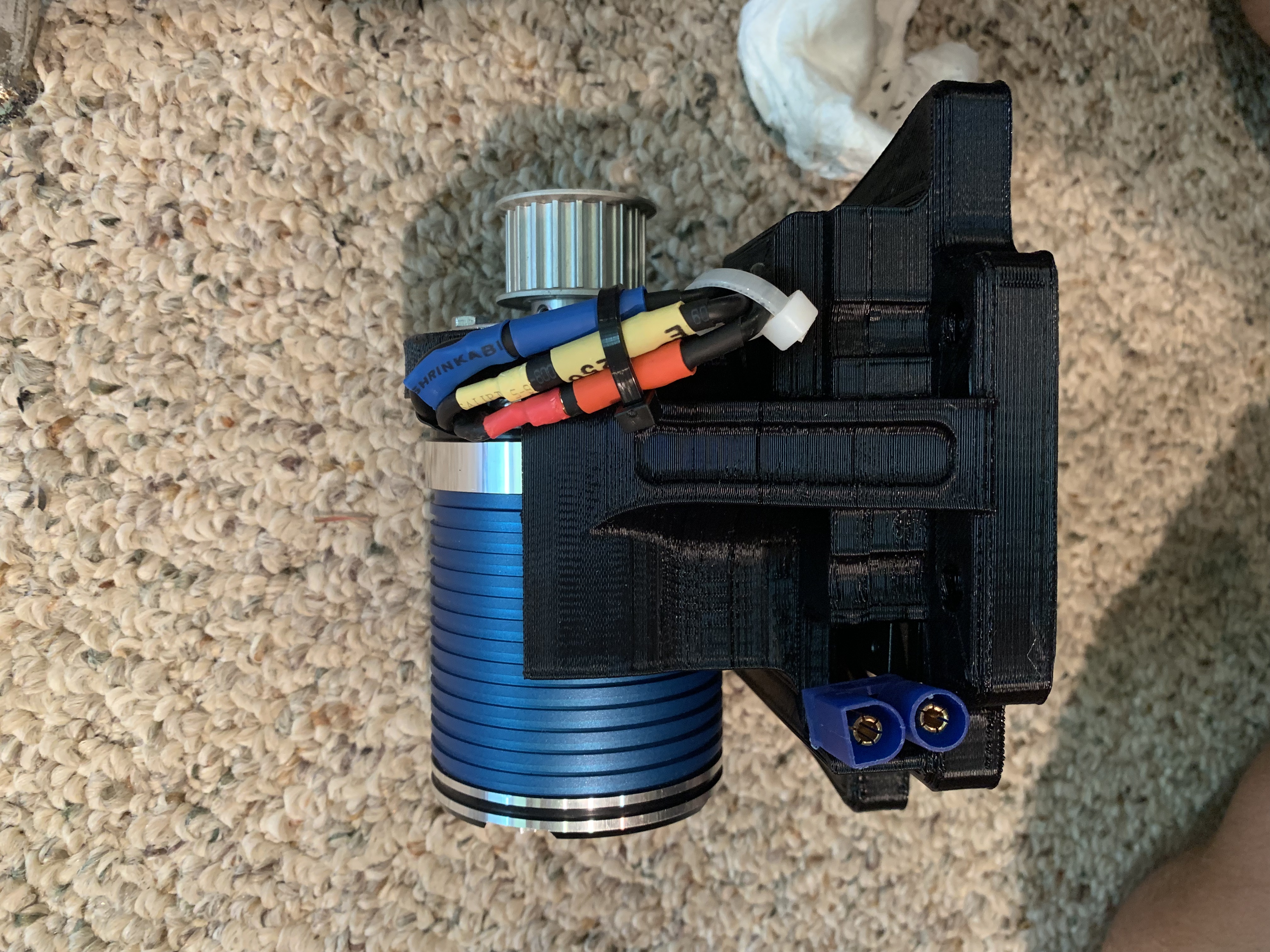
I tackled the drivetrain first. The scooter originally had a small, brushed-DC motor, with a chain and sprocket drive. I needed more power and needed to transmit torque in both directions for regenerative braking so all of this had to go! The plan was to use a VESC motor controller with a sensored brushless motor. The VESC is an open source/open hardware electronic speed controller designed for small electric vehicles. I’m familiar with it from my electric skateboard project and it has all the functionality I need for this project so it was an easy decision. I choose the Turnigy Sk8 6374 149KV motor. This was rated for the max power output of the VESC and had hall-effect sensors built in so it could deliver smooth startup torque. Next, I used this electric skateboard calculator to determine, based on my setup, that a gear reduction of about 5:1 would get me close to my goal of 35mph . A 90 tooth pulley was the largest I could find easily available, which meant my motor pulley would be 18 teeth. I printed a hub adapter to fix the pulley to the rear wheel and machined a bearing pocket in the center of the pulley to locate it concentric on wheel the axel.




I designed a motor mount that interfaced with the existing bolt pattern and spaced the motor the correct distance from the rear pulley based on this belt calculator. It also housed the VESC, that way the phase wires from the motor could be as short as possible. This helps the speed controller because it listens to the back EMF from the motor and shorter phase wires makes this less noisy. The mount was FDM printed.



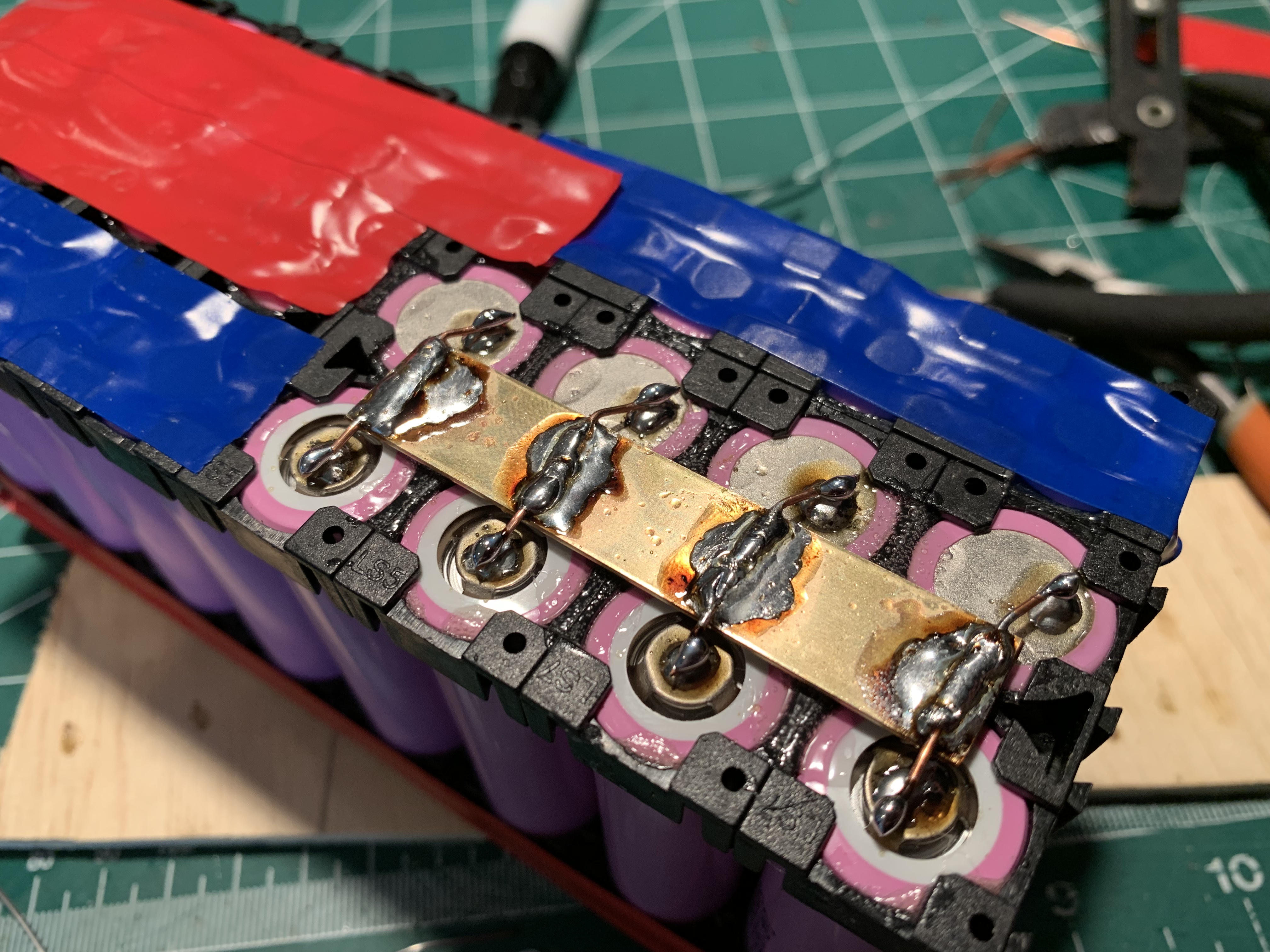
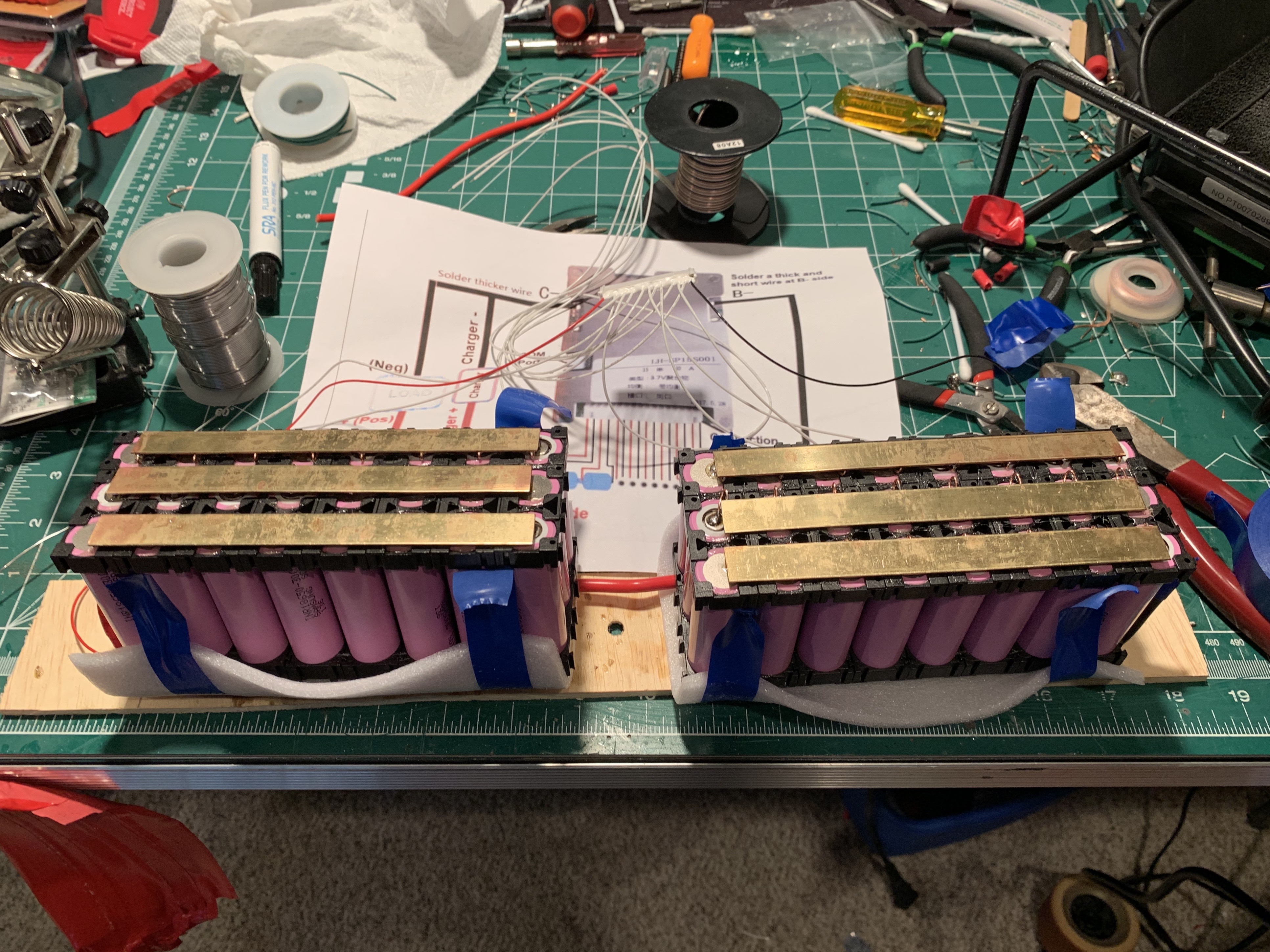
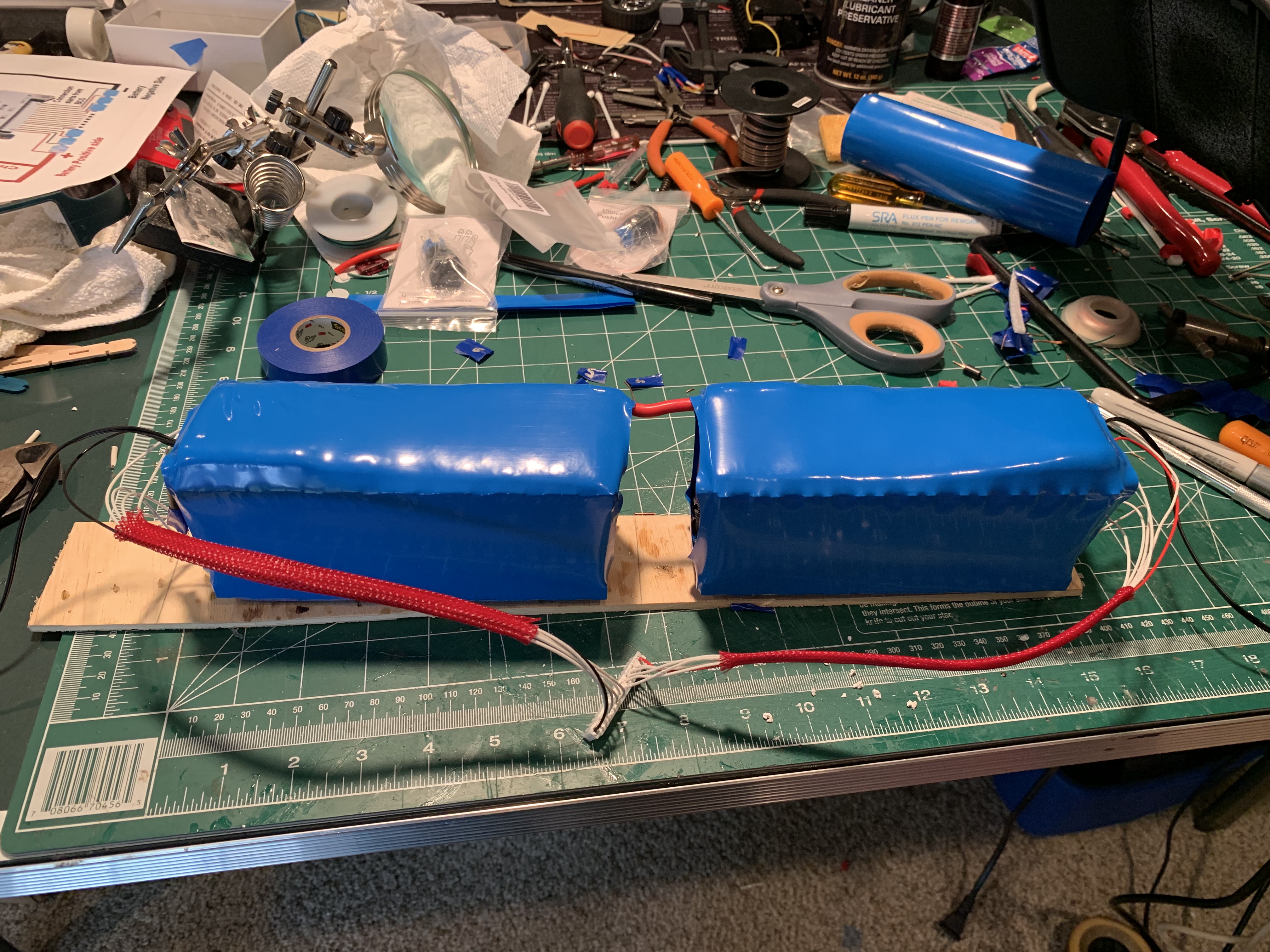
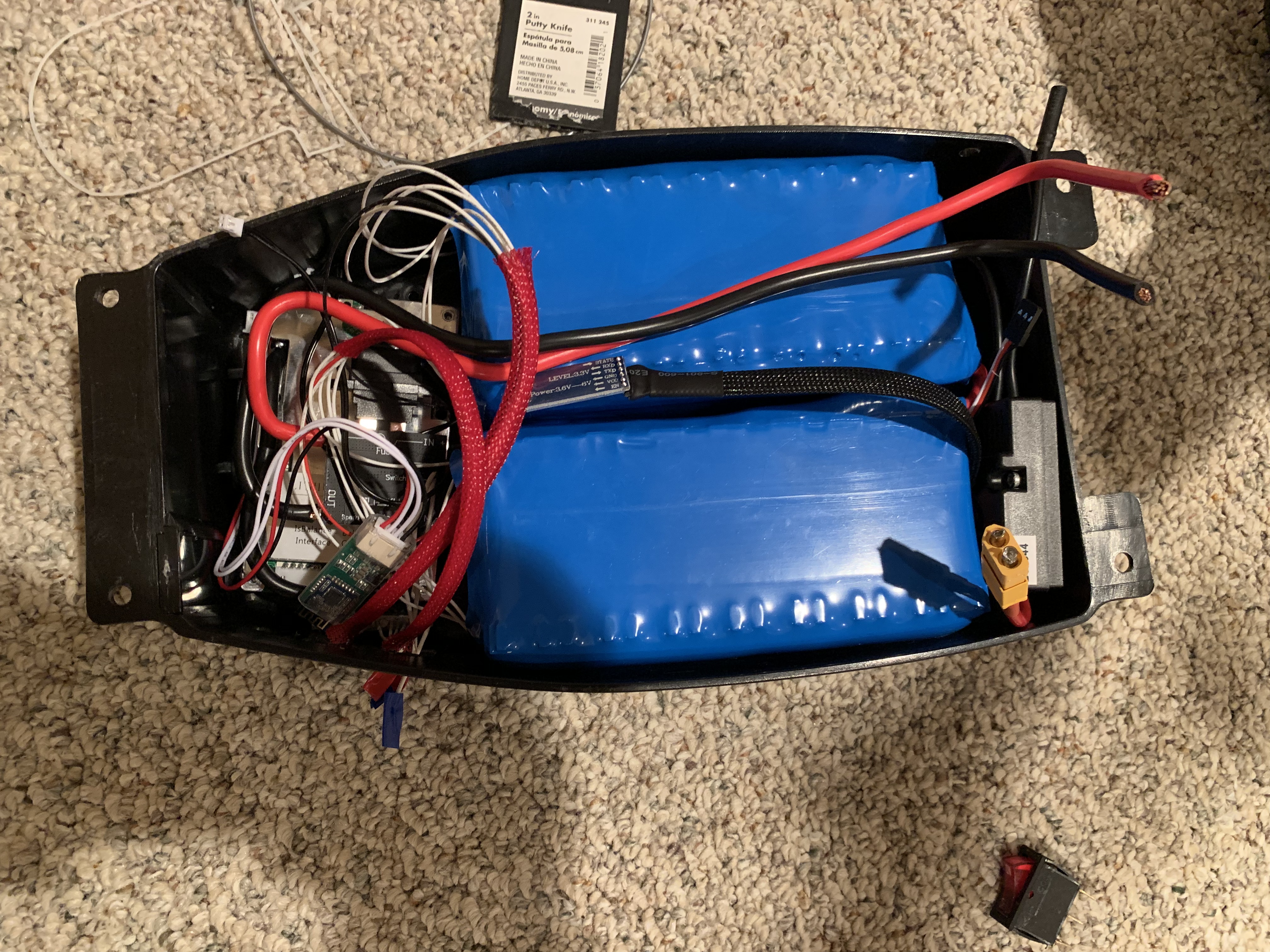
Next, I built the battery. I made a 12s 4p pack which consisted of 48 Samsung 30Q 18650 cells. This would be able to deliver a maximum 60 amps continuous which was also the limit to the VESC. This battery was almost twice as large as my skateboard battery, which had a range of 15 miles, so I was confident I could reach 20 miles with the scooter.
Typically, batteries like these are spot welded together with nickel busbars. I didn’t have a spot welder, so I used 120W soldering iron to solder small copper wires to the cell terminals. These copper wires were soldered to brass busbars. I then wired up the battery management system (BMS) which keeps all the cell voltages balanced.




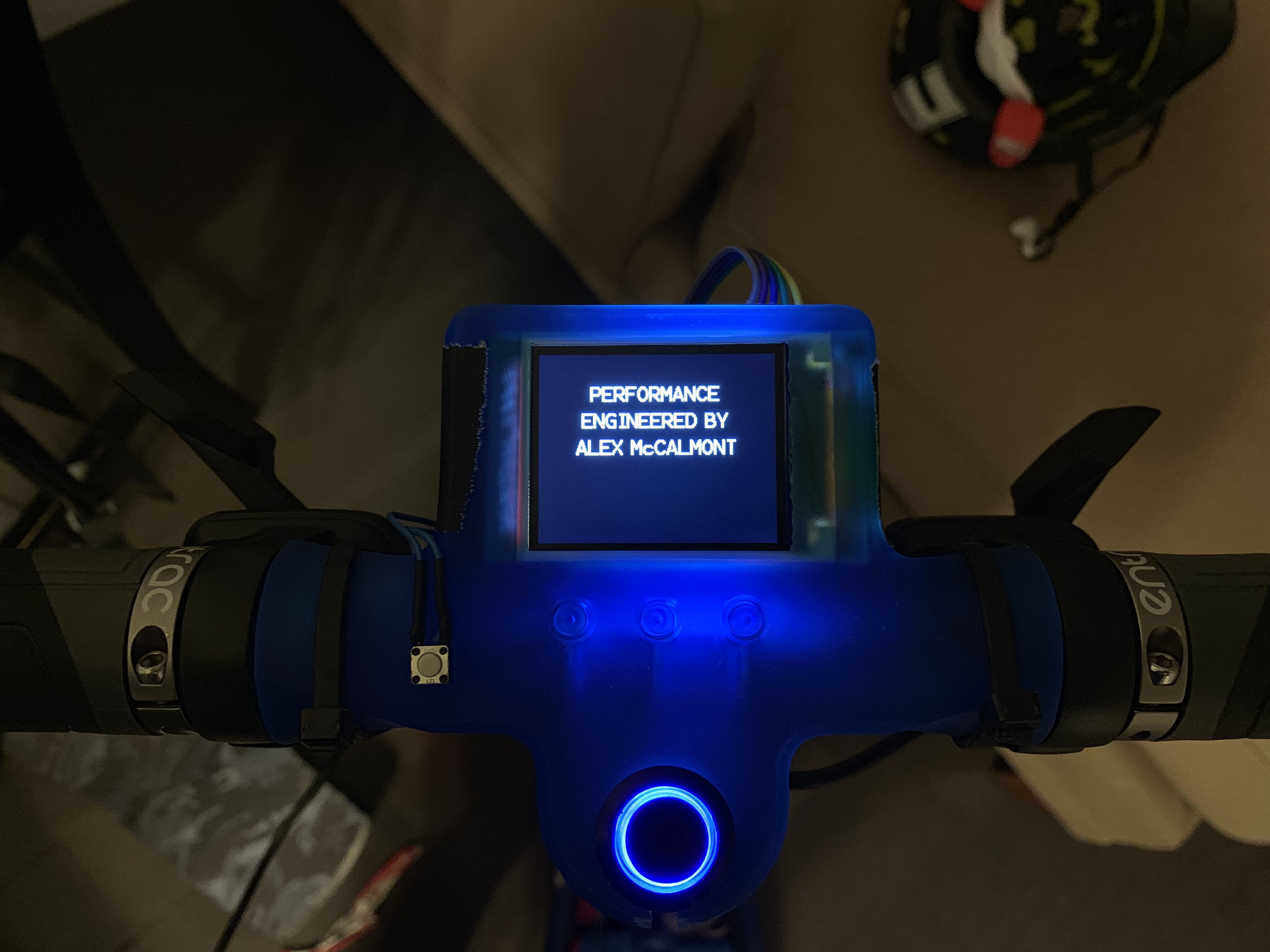
I controlled acceleration and braking using two hall-effect finger throttles. I also designed an enclosure to mount a 2″ LCD which displays live data from the VESC using Arduino-based hardware called DAVEga.